2020年3月9日,新泽西州新不伦瑞克—罗格斯大学工程师创建了一种台式设备,该设备结合了机器人,人工智能以及近红外和超声成像技术来抽取血液或插入导管来输送液体和药物。
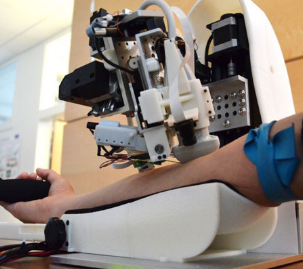
该设备可以在最少的监督下将针头和导管准确地引导到细小的血管中。它可以执行复杂的视觉任务,包括从周围组织中识别血管,对其进行分类并估算其深度,然后进行运动跟踪。机器人插管由一系列深层卷积神经网络的预测驱动,这些神经网络对来自多模式图像序列的时空信息进行编码,以指导机器人的实时运动控制。通过在志愿者中进行成像和机器人跟踪研究,研究人员证明了在存在解剖变异和运动的情况下,该设备能够对周围血管进行分割,分类,定位和跟踪的功能。他们评估了在难以通入血管的幻影和动物模型中的机器人性能,并表明与经过培训的操作员进行手动插管相比,该设备可以提高成功率和手术时间,尤其是在生理条件恶劣的情况下。
“通过使用志愿者,模型和动物,我们的设备表明,与专家医疗保健专业人员(尤其是难以接近的血管)相比,该设备可以准确地查明血管,提高成功率和手术时间,”说过。
该小组计划对器械进行更多的研究,涉及的对象范围更广,包括具有正常血管和有问题的血管的人。
Yarmush说:“该设备不仅可以用于患者,还可以进行修改以在啮齿动物中抽血,这对制药和生物技术行业的动物进行药物测试极为重要。”















