机器人技术中最热门的主题之一是软机器人领域,该领域使用的是柔软和柔性的材料,而不是传统的刚性材料。但是软机器人由于缺乏良好的感知而受到限制。好的机械手需要感觉到它正在触摸的东西(触觉),并且需要感觉到手指的位置(本体感觉)。大多数软机器人都缺少这种感应。
麻省理工学院计算机科学与人工智能实验室(CSAIL)的研究人员在新论文中提出了新工具,以使机器人更好地感知与之交互的内容:查看和分类项目的能力以及更柔和细腻的触感。
“我们希望通过感受世界来看到世界。麻省理工学院教授兼CSAIL主任Daniela Rus表示,柔软的机器人手具有感应到的皮肤,可以用来拾取各种物体,从诸如土豆片的细腻物体到诸如牛奶瓶的重物。
一篇论文以 麻省理工学院和哈佛大学去年的研究为基础 ,在那里,一个团队开发了一种柔软而结实的机器人抓手,其形式为锥形折纸结构。它像金星的捕蝇器一样塌陷在物体上,以捡起重量是其重量100倍的物品。
为了使新发现的通用性和适应性更接近于人的手,一个新团队提出了一个明智的选择:由连接压力传感器的乳胶“气球”(气球)制成的触觉传感器。新的传感器可让夹具不仅拾物细腻薯片,而且还对其进行分类-让机器人更好地了解 什么 它捡起,同时还表现出光触摸。
在对物体进行分类时,即使物体滑脱,传感器也能正确识别出十个物体,准确率超过90%。
麻省理工学院的博士后约瑟·休斯(Josie Hughes)说:“与许多其他柔软的触觉传感器不同,我们的传感器可以快速制造,改装成抓具,并显示出灵敏度和可靠性。” “我们希望他们提供一种新的软感测方法,该方法可以应用于制造设置中的各种不同应用,例如包装和起重。”
在第二篇论文中,一组研究人员创建了一个柔软的机器人手指,称为“ GelFlex”,它使用嵌入式摄像头和深度学习来实现高分辨率的触觉感应和“本体感觉”(对身体的位置和运动的感知)。
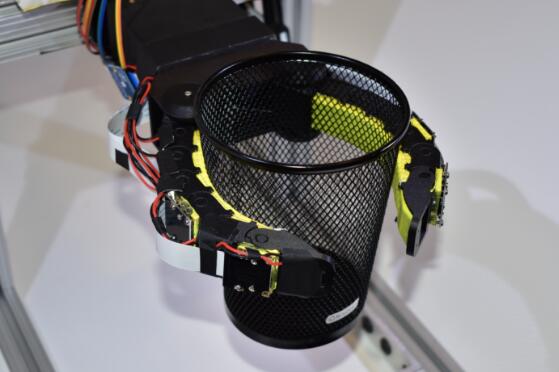
该抓手看上去很像一个在汽水站看到的两指杯抓手,它使用腱驱动的机构来驱动手指。在各种形状的金属物体上进行测试时,该系统的识别精度超过96%。
“我们的软手指可以在本体感觉上提供高精度,并可以准确地预测所握住的物体,并且还可以承受相当大的冲击力,而不会损害相互作用的环境及其自身,” GelFlex上新论文的主要作者余社说。“通过用灵活的外骨骼约束软手指,并使用嵌入式摄像头执行高分辨率感应,我们为软操纵器提供了广泛的功能。”
魔球感官
魔术球夹持器由柔软的折纸结构制成,并由柔软的气球包裹。当向气球施加真空时,折纸结构在物体周围闭合,并且抓取器变形为其结构。
尽管此动作使抓取器能够抓取比以往任何时候都广泛的物体,例如汤罐,锤子,酒杯,无人机,甚至是单个西兰花小花,但仍然无法达到更大的精致度和理解力,直到他们增加了传感器。
当传感器受到力或拉力时,内部压力会发生变化,团队可以测量压力的这种变化,从而确定何时会再次感到这种压力。
除乳胶传感器外,该团队还开发了一种算法,该算法利用反馈使抓取器具有既坚固又精确的类似于人的双重性,并且80%的被测试对象均已成功抓紧而没有损坏。
该团队在 各种家用物品上测试了抓取器传感器,这些物品从重瓶到细小的物品,包括罐,苹果,牙刷,水瓶和一袋饼干。
展望未来,该团队希望通过使用计算设计和重构方法来提高方法的可扩展性,从而使用这种新的传感器技术来提高分辨率和覆盖范围。最终,他们设想使用新传感器创建显示可伸缩性和灵敏度的流体感测皮肤。
休斯与罗斯共同撰写了新论文。他们几乎在2020年机器人与自动化国际会议上展示了该论文。
GelFlex
在第二篇论文中,CSAIL团队着眼于赋予软机器人抓手更细微,类似于人的感觉。柔软的手指允许很大范围的变形,但要以受控方式使用,必须具有丰富的触觉和本体感觉。该团队使用了带有广角“鱼眼镜头”镜头的嵌入式相机,可以非常详细地捕获手指的变形。
为了创建GelFlex,该团队使用了硅树脂材料来制作柔软透明的手指,并将一个摄像头放在指尖附近,将另一个摄像头放在手指中间。然后,他们在手指的正面和侧面涂了反射性墨水,并在背面增加了LED灯。这使内置鱼眼镜头可以观察手指的正面和侧面的状态。
该团队训练了神经网络,以从内部摄像机中提取关键信息以进行反馈。一种神经网络经过训练可以预测GelFlex的弯曲角度,另一种神经网络可以经过训练来估计要抓取的物体的形状和大小。然后,抓取器可以拾取各种物品,例如魔方,DVD盒或一块铝。
在测试过程中,握持时的平均位置误差小于0.77 mm,这比人的手指要好。在第二组测试中,抓取器面临抓握和识别各种尺寸的圆柱体和盒子的挑战。在80个试验中,只有三个被错误分类。
未来,该小组希望改善本体感觉和触觉感应算法,并利用基于视觉的传感器来估计更复杂的手指配置,例如扭曲或侧弯,这对普通传感器来说是挑战,但嵌入式摄像头应该可以实现。















