可根据需要重新配置的软机器人和生物医学植入物通过一种打印变形材料的新方法越来越接近现实。
赖斯布朗工程学院的拉斐尔·韦尔杜斯科(Rafael Verduzco)和研究生摩根·巴恩斯(Morgan Barnes)开发了一种打印对象的方法,该对象可以在暴露于温度,电流或压力变化的情况下以其他形式处理。
研究人员认为这是反应性的4-D打印。他们的工作发表在美国化学学会杂志ACS Applied Materials and Interfaces上。
他们首先在2018年报告了他们在模具中制造变形结构的能力。但是,使用相同的化学方法进行3-D打印会将结构限制为位于同一平面上的形状。这意味着不能将凸块或其他复杂的曲率编程为替代形状。
Verduzco说,克服使印刷工艺与成型脱钩的限制是朝着更有用的材料迈出的重要一步。
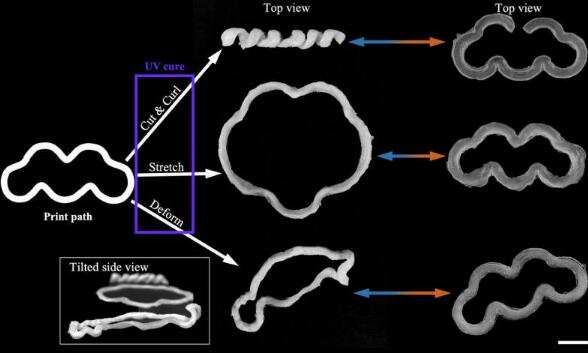
Verduzco说:“这些材料一旦制成,将自动改变形状。”“我们需要一种控制和定义这种形状变化的方法。我们的简单想法是依次使用多个反应来打印材料,然后决定如何改变形状。我们的方法不是一步一步地完成所有操作,而是在控制初始形状和最终形状方面具有更大的灵活性,还使我们能够打印复杂的结构。
实验室面临的挑战是创建一种液晶聚合物“墨水”,该墨水将分子之间相互排斥的化学键结合在一起。一种确定原始的打印形状,另一种可以通过物理方式处理打印干燥的材料来设置。在紫外线下固化替代形式会锁定这些链接。
一旦设置了两种编程形式,则材料可以在加热或冷却时来回变形。
研究人员必须找到一种可以在催化剂浴中印刷并仍保持其原始程序形状的聚合物混合物。
“我们必须优化许多参数,从所用的溶剂和催化剂到溶胀度和油墨配方,以使油墨足够快地固化以印刷,同时又不抑制所需的最终形状致动,” Barnes说。 。
该过程的另一个局限性是能够打印不受支持的结构(如列)。她说,要做到这一点,就需要一种胶凝剂足以在印刷过程中自我支撑。获得这种能力将使研究人员能够打印出更加复杂的形状组合。
巴恩斯说:“未来的工作将进一步优化印刷配方,并使用脚手架辅助的印刷技术来制造在两种不同复杂形状之间转换的执行器。”“这为印刷软机器人打开了大门,这些软机器人可以像水母一样游泳,像板球一样跳跃或像心脏一样运送液体。”















