一群机器鱼本周登上了科学机器人的封面,由哈佛大学的研究人员提供。Florian Berlinger、Melvin Gauchi 和 Radhika Nagpal 发表了一篇论文,题目是“受鱼启发的机器人群中 3D 水下集体行为的隐式协调”。这些小机器人也非常非常可爱。
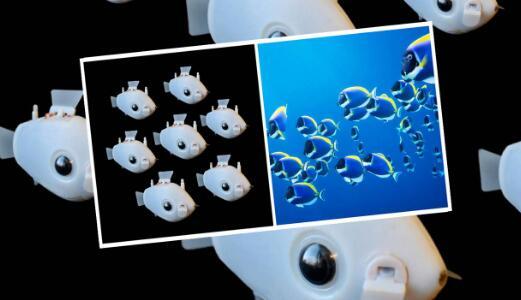
本研究中的 3D 水下机器人集体称为 Blueswarm。这些机器人被称为 Bluebots。每个 Bluebot 都具有 3D 视觉感知能力,并通过“自主 3D 多鳍运动”四处游荡。
这个机器人使用一个尾鳍、两个胸鳍和一个背鳍。背鳍处理垂直潜水以控制深度,而其他三个鳍则用于实现“几乎独立的向前和转动运动”。
每个 Bluebot 都与两个摄像头配合使用,使其拥有几乎全向的视野。Bluebot 摄像头收集的图像数据经过处理以确定附近其他 Bluebot 机器人的动作。有了这些信息,每个 Bluebot 都能够采取行动和做出反应——他们看到他们的机器鱼伙伴,并根据这些数据进行本地决策。
Bluebot 机器人通过一对 LED 灯检测彼此。每个机器人都有自己的两盏灯,并且每个 Bluebot 相机都经过训练以专注于这些灯。每个 Bluebot 都经过训练,可以根据检测到的与外来物体的距离来对一组参数做出反应。
当使用最新的 Blueswarm 软件和 Bluebot 硬件时,每个机器人都可以根据任何一个或整个群体的运动来采取行动和做出反应。
一项实验验证表明,部署了七个 Bluebot 以寻找水箱中的红光源。每个 Bluebot 都能够相互搜索、收集和发出警报。在下面的图表中,您将看到蓝色、绿色和黄色指示的搜索、收集和警报。
一旦一个机器人发现了红色光源,它就会从蓝色(搜索)切换到黄色(警报)。一旦发生这种情况,其他每个 Bluebot 都开始切换为绿色(聚集),向第一个蜂拥而至,因为它们检测到第一个机器人的黄色(警报)。
这显示了对刺激的理解和反应的级联反应。如果您在野外或在视频中看到过一群鱼,您就会看到与这些 Bluebot 机器人所展示的类似的东西。现在,为了让那些旱地跑步机器人同步——我们手上可以有一个侏罗纪公园般的情况,没有汗水!
有关 Bluebots 和 Blueswarm 的更多信息,请查看研究论文“受鱼启发的机器人群中 3D 水下集体行为的隐式协调”。本文由 Florian Berlinger、Melvin Gauchi 和 Radhika Nagpal 撰写。您可以在 Vol. 10.1126/scirobotics.abd8668 中找到代码为 DOI 的这篇论文。6,Science Robotics 第 50 期,定于 2021 年 1 月 20 日出版。















