在尝试将机器人部署到危险环境中时,应急响应工作人员面临的挑战之一是将机器人置于需要的位置。有时最好将机器人扔进充满碎片的房间或建筑物,但机器人必须在轮子或踏板上,否则它们就无法正常工作。研究人员开发了一种名为 AGRO 的机器人,它可以被扔到环境中并始终靠轮子着陆。
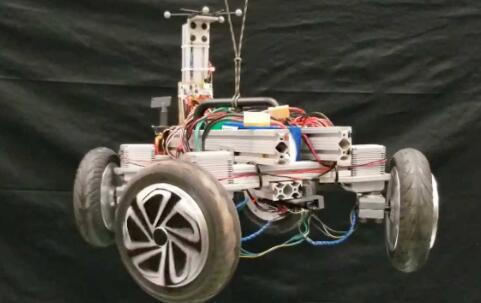
AGRO 代表 Agile Ground RObot,原型是由西点军校的团队创建的。每个车轮都可以独立于其他车轮移动,并有自己的电动轮毂电机。能够独立操纵每个车轮使机器人更加灵活和机动。
当机器人被抛出时,其机载惯性测量单元可以瞬间检测到自由落体。然后惯性测量单元触发一个集成的比例微分 (PD) 控制器,该控制器设置每个车轮以不同的角度和速度旋转。车轮以不同角度和速度旋转的结果会产生扭矩来控制机器人的俯仰、滚转和偏航角,以便它可以降落在所有四个车轮上。
该动作可确保机器人始终直立在其轮子上,并有助于均匀分布冲击力,从而最大程度地减少潜在损坏。一旦启动,AGRO 就可以进入环境并在人类救援人员的帮助下进行探索。设计团队计划制造一个末端带有轮子的弯曲腿的未来版本。
这种设计将有助于吸收冲击带来的冲击,并允许机器人跨越障碍。AGRO 是在学院的机器人研究中心设计的。















