由康奈尔大学的科学家领导的合作创造了第一个微型机器人,其中包含能够由标准电子信号控制的半导体组件。由于该电子信号,微型机器人也能够行走。研究人员表示,这些机器人的大小与草履虫差不多,并为构建更复杂的自身版本提供了模板,这些版本利用基于硅的智能进行大规模生产。
总有一天这种类型的机器人可以穿过人体组织和血液。这些机器人是研究人员先前纳米级创作的最新版本,包括微型传感器和基于图形的折纸机。草履虫大小的机器人大约 5 微米厚,40 微米宽,从 40 到 70 微米不等。
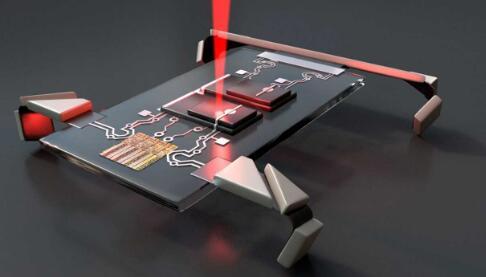
每个机器人都有一个由硅光伏制成的简单电路,用作机器人的躯干和大脑,以及四个用作腿的电化学致动器。创造微型机器人的腿非常困难。没有可用于机器人的微型电动执行器,因此研究人员必须发明它们并将它们与电子设备结合起来。
原子层沉积和光刻技术被用来用只有几十个原子厚的铂带构建腿,一边是一层薄薄的惰性钛。当对铂施加正电荷时,带负电荷的离子会吸收到周围溶液的暴露表面中以中和电荷。离子迫使铂膨胀,使条带弯曲。
用于腿的铂金条非常薄,可以急剧弯曲而不会断裂。为了控制四肢的运动,研究人员在条带顶部使用了刚性聚合物面板。面板之间的间隙就像膝盖或脚踝一样,允许腿以可控的方式弯曲。
这些机器人是通过在不同的光伏电池上闪烁的激光脉冲为不同的腿充电来控制的。当激光在前后光伏之间来回切换时,机器人可以行走。这些小机器人需要非常低的 200 毫伏电压和仅 10 纳瓦的功率。该团队目前正在探索改进机器人的方法,以创建成群的微型机器人,这些机器人可以在人体内爬行以修复损伤并充当探针。















